IE5 660-1140V TBVF тобовар ба таркиш муҳаррики синхронии магнитии доимии паст



Мушаххасоти маҳсулот
| EX-марк | EX db I Mb |
| Шиддати номиналӣ | 660,1140В... |
| Диапазони нерӯ | 37-1250кВт |
| Суръат | 0-300 чархзании |
| Басомад | Басомади тағйирёбанда |
| Марҳила | 3 |
| полякхо | Аз рӯи тарҳи техникӣ |
| Диапазони чаҳорчӯба | 450-1000 |
| Монтаж | B3,B35,V1,V3..... |
| Дараҷаи изолятсия | H |
| Дараҷаи муҳофизат | IP55 |
| Вазифаи корӣ | S1 |
| Мутобиқшуда | Бале |
| Давраи истеҳсолӣ | 30 рӯз |
| Пайдоиши | Хитой |
Хусусиятҳои маҳсулот
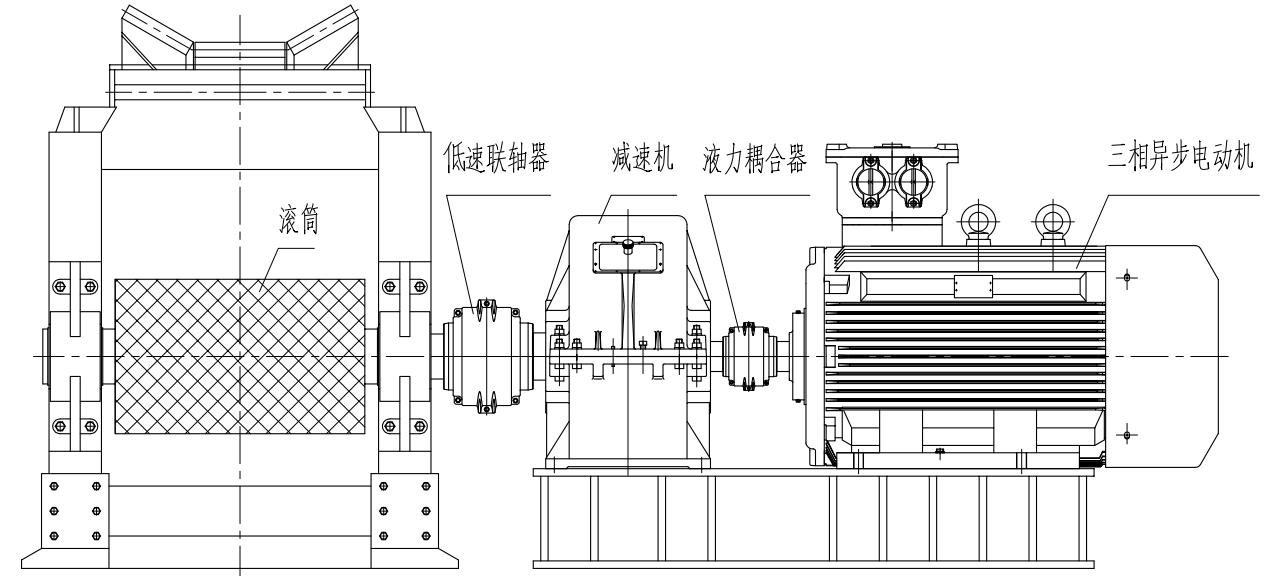
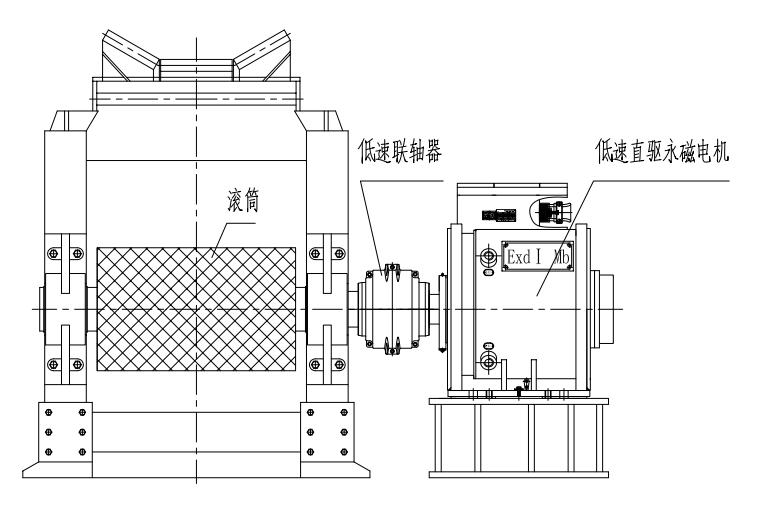
1. Қуттии редуктор ва муфтаи гидравликиро нест кунед. занҷири интиқолро кӯтоҳ кунед. пробле-маи пошидани равган ва пур кардани сузишворй вучуд надорад. сатҳи пасти шикасти механикӣ. эътимоднокии баланд.
2. Тарҳи фармоишии электромагнитӣ ва сохторӣ мувофиқи таҷҳизот. ки бевосита ба суръат ва моменти моменти зарурии бор чавоб дода метавонад;
3. Ҷараёни оғози паст ва баландшавии ҳарорати паст. бартараф кардани хатари демагнетизатсия;
4. бартараф намудани талафоти самаранокии интиқоли қуттии редуктор ва муфтаи гидравликӣ. система самаранокии баланд дорад. самаранокии баланд ва сарфаи энергия. Сохтори оддӣ. садои пасти корӣ ва хароҷоти ками нигоҳдории ҳаррӯза;
5. Қисми ротор дорои сохтори махсуси дастгирӣ мебошад. ки ин имкон медихад подшипник дар махал иваз карда шавад. бартараф намудани харочоти таъминоти моддию техникй барои баргаштан ба завод;
6. Қабули системаи гардонандаи мустақими муҳаррики синхронии магнитии доимӣ метавонад мушкилоти "аспи калон кашидани аробаи хурд" -ро ҳал кунад. ки метавонад ба талаботи доираи васеи сарбории кори системаи аслӣ ҷавобгӯ бошад. ва баланд бардоштани самаранокии умумии система. бо самаранокии баланд ва сарфаи энергия;
7. Назорати табдилдиҳандаи басомади векториро қабул кунед. диапазони суръат 0-100%, иҷрои оғоз хуб аст. Фаъолияти устувор. Метавонад коэффисиенти мувофиқро бо қувваи воқеии сарборӣ кам кунад.
Аризаи маҳсулот
Ин маҳсулот метавонад таҷҳизоти кони ангиштро, ки ба таври васеъ дар зеризаминӣ барои кашонидани таҷҳизоти гуногун, аз қабили вентиляторҳо, насосҳо ва мошинҳои камарбандӣ истифода мешавад, равона кунад.






Саволҳои зиёд такрормешуда
Нуқтаҳои асосии интихоби муҳаррики суръати паст (rpm) кадомҳоянд?
1. Реҷаи кор дар сомона:
Ба монанди навъи сарборӣ, шароити муҳити зист, шароити хунуккунӣ ва ғайра.
2. Таркиб ва параметрҳои механизми интиқоли аслӣ:
Ба монанди параметрҳои лавҳаи редуктор, андозаи интерфейс, параметрҳои sprocket, ба монанди таносуби дандон ва сӯрохи чоҳ.
3. Нияти азнавсозӣ:
Махсусан, гардонандаи мустақим ё ниммустақимро иҷро кардан лозим аст, зеро суръати мотор хеле паст аст, шумо бояд назорати даври пӯшидаро иҷро кунед ва баъзе инвертерҳо назорати даври пӯшидаро дастгирӣ намекунанд. Илова бар ин, самаранокии мотор пасттар аст, дар ҳоле ки арзиши муҳаррик баландтар аст, арзиши самаранок баланд нест. Такмил бартарии эътимоднокӣ ва бе нигоҳдорӣ мебошад.
Агар арзиш ва самаранокии хароҷот муҳимтар бошад, баъзе шароитҳо вуҷуд доранд, ки дар он як роҳи ҳалли ниммустақим ҳангоми таъмини нигоҳдории камшуда мувофиқ аст.
4. Назорати талабот:
Новобаста аз он ки бренди инвертер ҳатмист, оё ҳалқаи пӯшида лозим аст, оё мотор ба масофаи алоқаи инвертер бояд бо кабинети электронии идоракунӣ муҷаҳҳаз карда шавад, кабинети электронии идоракунӣ бояд кадом вазифаҳоро дошта бошад ва барои DCS дурдаст кадом сигналҳои алоқа лозиманд.
Фарқи асосии байни талафоти муҳаррикҳои магнитии доимии як андоза дар муқоиса бо муҳаррикҳои асинхронӣ чист?
Истеъмоли ками миси статор, истеъмоли ками миси ротор ва истеъмоли ками оҳани ротор.





